La mia Mantua EVO 4WS
- Dettagli
- Creato: Mercoledì, 15 Febbraio 2006 03:00

La più grande dote dei modelli da rally della Mantua Model è che anche se si montano a caso, mescolando tutti i pezzi, alla fine viene fuori sempre una Mantua da rally e quasi sempre una Mantua da rally competitiva. Se poi a questo ci si aggiunge un po' di fantasia, qualche cognizione di tipo tecnico e tanta passione il risultato può essere anche gratificante...
Qualche giorno fa, riordinando i ricambi in cassetta, mi sono ritrovato tra le mani il treno anteriore che montava il mio modello al momento dell'acquisto (l'ho comprato usato su internet) ; un
 avantreno evo IV che avevo provveduto a sostituire quasi subito con il più nuovo avantreno evo V o Pentium che dir si voglia e che avevo gettato in cassetta convinto che non ne avrei più fatto uso. Osservando quei pezzi e rovistando nel database dei ricordi è scattata nella mia mente una catena di associazioni che collegava il lontano ricordo di un modello Citroen con un particolare sistema di sospensioni posteriori, una foto scattata a Messina alla macchina di Lenzi (credo) in occasione della gara di campionato italiano, ed una serie di piccoli appunti mentali che mi ero fatto gironzolando su RCBazar tra i vari articoli di coloro i quali si sono cimentati nella sperimentazione dell'avantreno Pentium montato dietro.
avantreno evo IV che avevo provveduto a sostituire quasi subito con il più nuovo avantreno evo V o Pentium che dir si voglia e che avevo gettato in cassetta convinto che non ne avrei più fatto uso. Osservando quei pezzi e rovistando nel database dei ricordi è scattata nella mia mente una catena di associazioni che collegava il lontano ricordo di un modello Citroen con un particolare sistema di sospensioni posteriori, una foto scattata a Messina alla macchina di Lenzi (credo) in occasione della gara di campionato italiano, ed una serie di piccoli appunti mentali che mi ero fatto gironzolando su RCBazar tra i vari articoli di coloro i quali si sono cimentati nella sperimentazione dell'avantreno Pentium montato dietro. Da qui l'idea: riprodurre sulla mia Mantua il principio di funzionamento delle sospensioni Citroen sfruttando i ricambi che mi ritrovavo in cassetta. Si trattava quindi di realizzare un retrotreno con sospensioni multilink che consentissero alle ruote posteriori di sterzare senza l'ausilio di servi ma sfruttando semplicemente il
rollio della macchina. Inizio, quindi, facendo la distinta del materiale disponibile, prendo le misure di tutti i componenti che mi sarebbero serviti e, come faccio sempre, passo qualche ora al computer per un assemblaggio virtuale del tutto, per verificarne il corretto funzionamento, e per definire le possibili geometrie. |
|
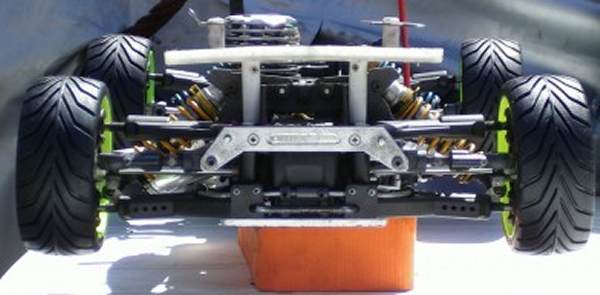
| Come ho avuto già modo di affermare .l'attuazione della strategia è la parte più facile del processo, purchè l'analisi preventiva sia stata ben condotta. Assemblare il tutto, quindi, non ha presentato particolari difficoltà : In una prima fase mi sono limitato a montare l'avantreno come da manuale preoccupandomi solamente di recuperare la larghezza della
carreggiata posteriore semplicemente agendo sui grani inferiori e sui tiranti dx/sx superiori. Così ho allungato i braccetti di 5 mm. La seconda fase è servita a realizzare e montare i puntoni che avrebbero determinato il funzionamento vero e proprio del sistema. |
|
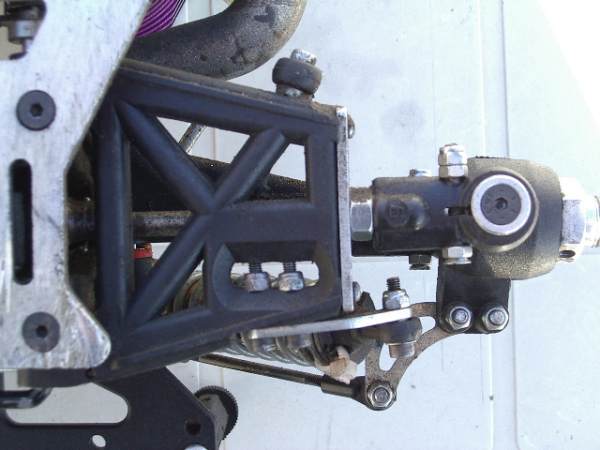
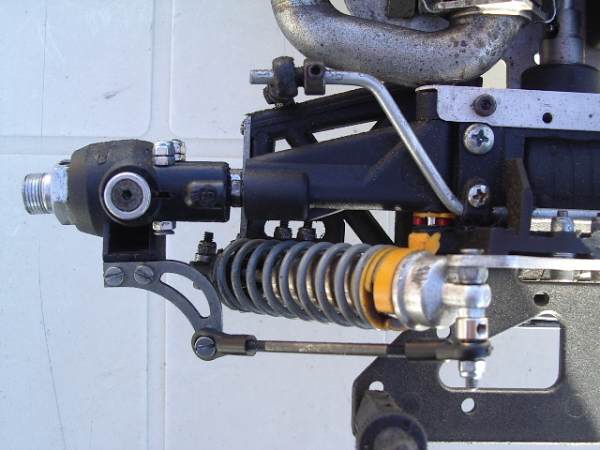
 Come si può vedere si tratta di due semplici aste filettate con manine ed
uniball. Le lunghezze di tali puntoni e i relativi punti di attacco sul
telaio si sono rivelate corrette come da simulazione al computer. La lunghezza dei puntoni determina la convergenza statica delle ruote posteriori. Il loro punto di attacco sul telaio e la loro inclinazione,la progressività con cui le ruote sterzano sotto l'effetto del rollio. Come si può vedere si tratta di due semplici aste filettate con manine ed
uniball. Le lunghezze di tali puntoni e i relativi punti di attacco sul
telaio si sono rivelate corrette come da simulazione al computer. La lunghezza dei puntoni determina la convergenza statica delle ruote posteriori. Il loro punto di attacco sul telaio e la loro inclinazione,la progressività con cui le ruote sterzano sotto l'effetto del rollio.Il tutto si completa con l'adozione degli ammortizzatori con molle corte e il montaggio dei tiranti della barra sulla parte anteriore dei braccetti inferiori che ho dovuto forare con una punta da 2.5 mm per poterci avvitare la vite che li blocca. |
| La terza fase è stato il test in pista. Il risultato disastroso. Dopo qualche giro i braccetti superiori si smontavano a causa del tirante dx/sx corto che rimaneva avvitato troppo poco all'interno delle plastiche, questo a causa della necessità di recuperare quei famosi 5 mm per lato della carreggiata. Anche i braccetti inferiori davano cenni di sofferenza strutturale. Tuttavia, quei pochi giri che ero riuscito ad inanellare mi avevano lasciato un' impressione tutt' altro che negativa. Torno all'analisi: scarto subito la possibilità di usare tiranti e grani più lunghi, i braccetti superiori non mi convincono proprio. I braccetti triangolari posteriori ( vedi rally race) sono troppo lunghi. l'avantreno pentium stile Messina non va bene perché non mi permette di montare gli ammortizzatori e relativo piastrino tutto dietro come nella pentium II. Decido quindi di irrigidire i braccetti inferiori avvitando tra il braccetto stesso e l'uniball un dado da 4 mm di spessore, così riesco a stringere il tutto a sufficienza perché non si allenti. |
|
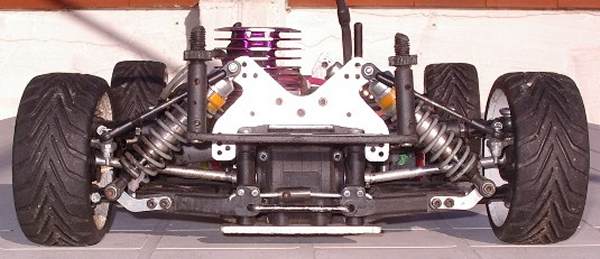
| Per i braccetti superiori ho adottato quelli dell'avantreno evo V dopo averli accorciati di 5 mm per poterci avvitare il tirante dx/sx e relativo uniball della evo IV. |
|
| Il risultato ottenuto dà un' impressione di maggiore solidità d' insieme ma, come al solito, è la pista che deve dare il responso finale. |
|
|
|
| LA PROVA Questa volta il test in pista è andato bene su tutti i fronti: il modello ha retto alla perfezione ed ha sopportato anche qualche inevitabile botta dovuta alla ricerca di un
assetto di riferimento da cui partire per l'analisi dei tempi.Nonostante le 4 ruote siano libere di sterzare, la macchina ha un comportamento per niente brusco: si è perso pochissimo inserimento e la percorrenza dei lunghi curvoni è veramente fantastica, più si accelera più la macchina carica sulla ruota esterna più questa chiude la traiettoria contrastando in modo eccellente la forza centrifuga. |
|
| La staccata non crea problemi a patto che la sospensione non recuperi troppo in negativo (in questo caso le ruote si aprono), quindi conviene regolare bene la battuta dei grani dell'altezza da terra in modo che in una situazione di massimo recupero le ruote siano al più parallele ma mai divergenti. La percorrenza dei tornanti non è problematica dato che il rollio è scarso e l'azione sterzante della sospensione minima. In accelerazione all'uscita delle curve, il trasferimento di carico al posteriore chiude contemporaneamente entrambe le ruote, ciò fa si che il modello si raddrizzi rapidamente a vantaggio della direzionalità e di una maggiore accelerazione. Dopo le prime regolazioni ed una prima comprensione del comportamento dinamico del modello collego il mio nuovo cronometro automatico dotato di trasponder al loop della pista e inizio la fase di rilevamento dei tempi. |
|
| Alla terza sessione di 5 minuti il cronometro sancisce il verdetto: il miglior tempo è anche il mio miglior tempo sulla pista di Reggio Calabria. Questo è il punto di partenza, la base da cui partire per migliorare il prototipo. Missione compiuta Ciao a tutti PMC |